Functions
This module contains the algorithms for the linear equations lab.
The materials follow Miranda and Fackler (2004, [MF04]) (Chapter 2). The python code heavily draws on Romero-Aguilar (2020, [RA20]) and Foster (2019, [Fos19]).
- labs.linear_equations.linear_algorithms.backward_substitution(a, b)[source]
Perform backward substitution to solve a system of linear equations.
Solves a linear equation of type
 when for an upper triangular matrix
when for an upper triangular matrix
 of dimension
of dimension  and vector
and vector  of length
of length  .
.- Parameters
a (numpy.ndarray) – Lower triangular matrix of dimension
.b (numpy.ndarray) – Vector of length
.
- Returns
x – Solution of the linear equations. Vector of length
.- Return type
numpy.ndarray
- labs.linear_equations.linear_algorithms.forward_substitution(a, b)[source]
Perform forward substitution to solve a system of linear equations.
Solves a linear equation of type
when for a lower triangular matrix
of dimension and vector of length .
The forward subsititution algorithm can be represented as: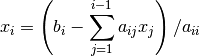
- Parameters
a (numpy.ndarray) – Lower triangular matrix of dimension
.b (numpy.ndarray) – Vector of length
.
- Returns
x – Solution of the linear equations. Vector of length
.- Return type
numpy.ndarray
- labs.linear_equations.linear_algorithms.gauss_seidel(a, b, x0=None, lambda_=1.0, max_iterations=1000, tolerance=1.4901161193847656e-08)[source]
Solves linear equation of type
using Gauss-Seidel iterations.In the linear equation,
denotes a matrix of dimension
and denotes a vector of length The solution
method performs especially well for larger linear equations if matrix :math`A`is
sparse. The method achieves fairly precise approximations to the solution but
generally does not produce exact solutions.Following the notation in Miranda and Fackler (2004, [MF04]), the linear equations problem can be written as

which suggest the iteration rule

which, if convergent, must converge to a solution of the linear equation. For the Gauss-Seidel method,
 is the upper triangular matrix formed from the upper triangular elements of
.
is the upper triangular matrix formed from the upper triangular elements of
.- Parameters
a (numpy.ndarray) – Matrix of dimension
b (numpy.ndarray) – Vector of length
.x0 (numpy.ndarray, default None) – Array of starting values. Set to be if None.
lambda (float) – Over-relaxation parameter which may accelerate convergence of the algorithm for
 .
.max_iterations (int) – Maximum number of iterations.
tolerance (float) – Convergence tolerance.
- Returns
x – Solution of the linear equations. Vector of length
.- Return type
numpy.ndarray
- Raises
StopIteration – If maximum number of iterations specified by max_iterations is reached.
- labs.linear_equations.linear_algorithms.naive_lu(a)[source]
Apply a naive LU factorization.
LU factorization decomposes a matrix
into a lower triangular matrix  and upper triangular matrix U. The naive LU factorization does not apply permutations to
the resulting matrices and thus only works reliably for diagonal matrices :
and upper triangular matrix U. The naive LU factorization does not apply permutations to
the resulting matrices and thus only works reliably for diagonal matrices :- Parameters
a (numpy.ndarray) – Diagonal square matrix.
- Returns
l (numpy.ndarray)
u (numpy.ndarray)
- labs.linear_equations.linear_algorithms.solve(a, b)[source]
Solve linear equations using L-U factorization.
Solves a linear equation of type
when for a nonsingular square matrix
of dimension and vector of length . Decomposes
Algorithm decomposes matrix into the product of lower and upper triangular matrices.
The linear equations can then be solved using a combination of forward and backward
substitution.Two stages of the L-U algorithm:
1. Factorization using Gaussian elimination:
 where denotes
a row-permuted lower triangular matrix.
where denotes
a row-permuted lower triangular matrix.  denotes a row-permuted upper
triangular matrix.
denotes a row-permuted upper
triangular matrix.2. Solution using forward and backward substitution. The factored linear equation of step 1 can be expressed as

The forward substitution algorithm solves
 for y. The backward substitution
algorithm then solves
for y. The backward substitution
algorithm then solves  for
for  .
.- Parameters
a (numpy.ndarray) – Matrix of dimension
b (numpy.ndarray) – Vector of length
.
- Returns
x – Solution of the linear equations. Vector of length
.- Return type
numpy.ndarray
Example
>>> b = np.array([1, 2, 3]) >>> a = np.array([[4, 0, 0], [0, 2, 0], [0, 0, 2]]) >>> solve(a, b) array([0.25, 1. , 1.5 ])